




(Hiina) YY2308B märg- ja kuivlaserosakeste suuruse analüsaator
Lühike kirjeldus:
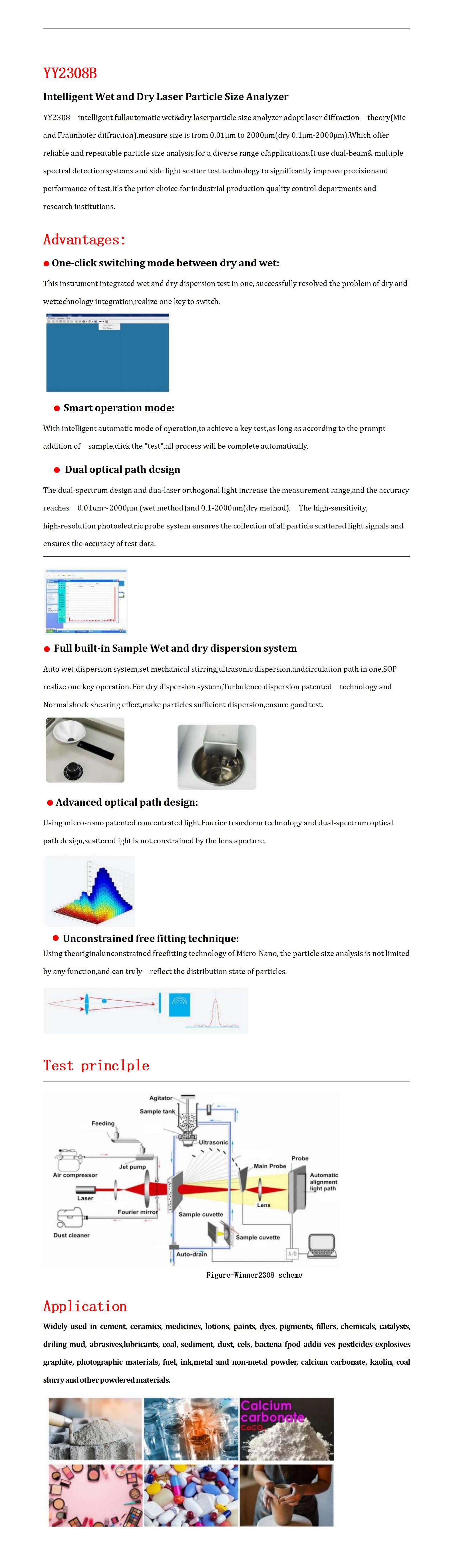
YY2308B intelligentne täisautomaatne märg- ja kuivlaserosakeste suuruse analüsaator kasutab laserdifraktsiooniteooriat (Mie ja Fraunhoferi difraktsioon), mõõtes suurust vahemikus 0,01 μm kuni 1200 μm (kuiv 0,1 μm-1200 μm), mis pakub usaldusväärset ja korratavat osakeste suuruse analüüsi mitmesuguste rakenduste jaoks. See kasutab kahekiirelist ja mitme spektraalse tuvastussüsteemi ning külgvalguse hajumise testitehnoloogiat, et oluliselt parandada testi täpsust ja jõudlust. See on tööstusliku tootmise kvaliteedikontrolli osakondade ja teadusasutuste eelnev valik.
https://www.jnyytech.com/news/yy2308b-dry-wet-laser-particle-size-analyzer-shipments/

- Peamised spetsifikatsioonid:
| Mudeli nimi | YY2308B | |
| Standardne | ISO13320-1:2009, GB/T19007-2016, Q/0100JWN001-2013Vastavus 21 CFR 11. osale | |
| Põhimõte | Laserdifraktsiooni põhimõte | |
| Analüüs | Mie ja Fraunhoferi hajumine | |
| Detektori paigutus | Logaritmjaotusega massiivkatsenurk alates0,015aste kuni 145 kraadi | |
| Mõõtevahemik | Märg: 0,01 μm-1200 μm Kuiv: 0,1 μm-1200 μm | |
| Räni fotodetektorid | Märg: 127tkKuiv: 100tk | |
| Täpsusviga | Märg1Kuivmassi % <1% (CRM D50) | |
| Korduvuse viga | Märg1Kuivmassi % <1% (CRM D50) | |
| Valgusallikas | Suure jõudlusega punane pooljuhtlaser (λ=639nm )P>3.0MWAbiseadmeroheline tahke ainepooljuhtlaser (λ=405nm)P>2,0 MW(saadaval) | |
| Optiline tee | Koonduva valguse Fourier' teisenduse optiline rada | |
| Efektiivne fookuskaugus | 500 mm | |
| Laseri ohutus | 1. klass | |
| Märg dispersioon | Ultraheli | Sagedus: 40 kHz Võimsus:60W, aeg: ≥1S |
| Sega | Pöörete kiirus: 0–3000 p/min (reguleeritav) | |
| Ringlusse laskma | Nimivool:30Nimivõimsus l/min:70W | |
| Veetaseandur(Ühendkuningriik | Vältige vee ülevoolu ja kaitske instrumenti tõhusalt | |
| Näidistank | Maht:1000 ml | |
| Mikroproovküvett | Maht: 10 ml (saadaval) | |
| Kuiv dispersioon | Kuivturbulentne dispersioon, patenteeritud tehnoloogia, tavaline lööklaine nihketehnika | |
| Söötmiskiirus | Reguleeritav (muutuva kiiruse nupp) | |
| Töörežiim | Täisautomaatne / käsitsi juhtimine, vabalt valitav | |
| Dispersioonikeskkond | Suruõhk, rõhk: 0 kuni 6 baari | |
| Optiline pingijoondussüsteem | Täisautomaatne, täpsus on kuni 0.2um | |
| TäisTesti kiirus aja kohta | Märg:<2 minutit kuivamist:<1 minutTestitulemuse vaheldumisaeg: 500 ms | |
| Väline mõõde | L104cm × L 44 cm × K 54cm | |
| Netokaal | 70 kg | |


Kirjuta oma sõnum siia ja saada see meile




